Por que un robot humanoide con IA avanzada aínda pode funcionar mal se a súa electrónica non está estreitamente coordinada?O movemento estable depende moito máis que só do cálculo.Require circuítos de detección, control, condución do motor, comunicación e cadea de sinal para funcionar como un sistema de bucle pechado sincronizado.Este artigo explica como estas capas traballan xuntas dentro de robots como Tesla Optimus e como inflúen no equilibrio, a capacidade de resposta e a precisión.
Catálogo
Figura 1. Como funciona realmente un robot moderno
Que fai que todas as partes dun robot funcionen como un único sistema?No deseño robótico práctico, o rendemento global non depende só dos compoñentes individuais, senón da eficacia que funcionan xuntos.
Cando un robot humanoide como Tesla Optimus anda, o movemento non é impulsado só pola IA.Implica a interacción coordinada entre algoritmos de control, sistemas integrados e compoñentes de hardware.Cada movemento está soportado por unha arquitectura electrónica estruturada que combina sensores, controladores, controladores de motores e interfaces de comunicación.Este deseño en capas úsase amplamente tanto en robots industriais como en sistemas de automatización avanzados porque ofrece un funcionamento estable e previsible ao longo do tempo.
Figura 2. Robots humanoides que camiñan en formación coordinada
Para comprender mellor como se constrúe este sistema, as seguintes seccións examinarán cada capa en detalle, incluíndo control, movemento, detección, comunicación e procesamento de sinal.
Non importa o bos que sexan os sensores ou os motores, o rendemento do robot aínda depende da rapidez coa que a unidade de control poida procesar datos e responder en tempo real.En robots como Tesla Optimus, a capa de control serve como centro de decisión, lendo continuamente entradas, executando algoritmos de control e actualizando os comandos de movemento en milisegundos.
Na robótica humanoide, os bucles de control deben executarse nun período de tempo moi curto para manter o equilibrio e a coordinación.Cando un robot axusta a súa postura despois dun paso, o controlador debe procesar os datos do sensor e actualizar os comandos do motor case de inmediato.Mesmo pequenos atrasos poden causar inestabilidade, mala coordinación ou resposta máis lenta, especialmente en sistemas multi-articulación, polo que se require un procesamento de baixa latencia nos deseños robóticos reais.
Figura 3. MCU como o cerebro dun robot
No nivel de entrada, o STMicroelectronics
STM32F103C8T6
 STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
é unha opción práctica para sistemas robóticos sinxelos e aplicacións integradas compactas como nodos de sensor, control de actuadores e tarefas básicas de condución de motores.Dispón dun núcleo Arm Cortex-M3 de 32 bits que funciona ata 72 MHz, xunto con 64 KB de flash, 20 KB de SRAM, saídas PWM, ADC de 12 bits e interfaces de comunicación estándar como USART, SPI e I2C.Estas capacidades proporcionan un bo equilibrio de rendemento, integración de periféricos e eficiencia de custos.
A medida que aumenta a complexidade do sistema, os controladores máis capaces, como o STMicroelectronics
STM32F407VGT6
 STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
, convértense mellor.Este MCU baséase nun núcleo Arm Cortex-M4 de 32 bits que funciona ata 168 MHz e inclúe ata 1 MB de flash e 192 KB de SRAM, xunto con periféricos avanzados como temporizadores múltiples, ADC de alta velocidade e instrucións DSP.Estas funcións permítenlle procesar varias entradas simultáneamente, como datos IMU, comentarios do codificador e sinais de comunicación, sen baixar o rendemento.Nos sistemas robóticos prácticos, isto mellora a sincronización do bucle de control, reduce a latencia e permite un movemento máis suave e sincronizado en varias articulacións.
Para robots humanoides avanzados ou aplicacións de alto rendemento, tamén se poden considerar controladores como o NXP Semiconductors
LPC55S69JBD100K
 LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
.Este dispositivo ofrece procesamento de dobre núcleo e funcións de seguridade e periféricos melloradas, polo que é adecuado para entornos de control complexos e multitarefa.
MCU afecta o comportamento do robot durante o funcionamento.Un MCU máis lento ou pouco potenciado pode producir respostas atrasadas, movemento inestable ou mala coordinación.Por outra banda, un controlador ben combinado garante que cada movemento se calcule e execute sen problemas, mesmo en condicións cambiantes.É por iso que a selección do controlador considérase unha decisión de deseño importante na enxeñería robótica.
No deseño práctico, os enxeñeiros raramente confían nun único controlador para todo o robot.En cambio, usan un enfoque de control por capas, onde os MCU máis sinxelos manexan tarefas locais (como motores individuais ou grupos de sensores), mentres que os controladores máis potentes xestionan decisións de nivel superior.
Se a capa de control é o "cerebro", entón esta é a capa onde as decisións convértense en movemento real.
Pero a pregunta é: moverase o robot con suavidade ou axitará, atrasará ou perderá precisión?En robots como Tesla Optimus, cada movemento depende de como o sistema de control do motor converte os comandos dixitais en enerxía eléctrica controlada.Non se trata só de acender e apagar motores.Trátase dun control de corrente preciso, precisión de tempo e transicións suaves, especialmente en sistemas con varias articulacións que traballan ao mesmo tempo.
Figura 4. IC do controlador de motor para o movemento preciso do robot
Para moitos sistemas robóticos de gama media, o Allegro MicroSystems
A4988SETTR-T
 A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
é unha das solucións máis utilizadas.Está deseñado para motores paso a paso e traduce sinais de paso e dirección simples en corrente controlada a través das bobinas do motor.Este controlador admite micropasos de ata 1/16 de resolución de paso e funciona con tensións de alimentación do motor de 8 V a 35 V, proporcionando ata aproximadamente 2 A por bobina cunha refrigeración adecuada.Estas características permiten un movemento máis suave e unha vibración reducida, polo que se usa habitualmente en impresoras 3D, máquinas CNC e plataformas robóticas básicas.
A medida que os sistemas robóticos se fan máis avanzados e compactos, as solucións integradas como Infineon Technologies TLE9879 proporcionan máis eficiencia.Este dispositivo combina un microcontrolador (núcleo Arm Cortex-M3 que funciona ata 40 MHz) cun controlador de motor nun único chip, xunto con interfaces de comunicación e xestión de enerxía integradas como LIN.Está deseñado especificamente para conducir motores de corrente continua con escobillas e admite unha fiabilidade de calidade automotriz.Ao integrar as etapas de control e potencia, reduce os compoñentes externos, acurta as rutas de sinal e mellora a eficiencia global do sistema.Isto dá como resultado un deseño de PCB máis sinxelo, unha resposta máis rápida e unha mellor fiabilidade, especialmente en módulos robóticos ou sistemas de control distribuídos con espazo limitado.Outros compoñentes, como o
PCA9538PW
 PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
de Texas Instruments, tamén xogan un papel de apoio ao ampliar as capacidades de E/S.
En sistemas robóticos prácticos, pódese combinar: controladores paso a paso como o A4988 para eixes simples e dispositivos integrados como o TLE9879 para deseños compactos ou de maior eficiencia.Este enfoque equilibrado garante que cada parte do robot industrial consiga a combinación correcta de rendemento e sinxeleza de deseño.
Como pode un robot humanoide sentir o que está a suceder ao seu redor?A capa de percepción é onde comeza esta capacidade.Encárgase de recoller datos físicos como movemento, inclinación, vibración e orientación, para logo convertelos en sinais eléctricos que o sistema de control poida comprender.
Nos robots modernos a detección non é opcional, é continua.Cada paso, rotación ou movemento repentino debe detectarse ao instante.Se un robot non pode percibir pequenos cambios no movemento, pode perder o equilibrio, facer movementos incorrectos ou fallar nas tarefas de precisión.Este robot ten detección de movemento rápida e fiable?Unha capa de percepción forte garante que o robot poida corrixirse en tempo real, o que leva a un funcionamento máis suave e seguro.
Os sensores de movemento como o acelerómetro Analog Devices
ADXL345BCCZ-RL7
 ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
úsanse amplamente nos sistemas de percepción robóticos.Este acelerómetro dixital de 3 eixes ofrece rangos de medición seleccionables de ±2 g, ±4 g, ±8 g e ±16 g, xunto cunha alta resolución (ata 13 bits) e un baixo consumo de enerxía de tan só 23 µA no modo de medición.Comunícase a través de interfaces I2C ou SPI e inclúe funcións integradas como detección de toques, detección de caída libre e seguimento de actividade/inactividade.Estas capacidades permiten que o robot detecte vibracións, inclinacións e movementos bruscos con boa precisión, o que o fai adecuado para manter a postura, estabilizar o movemento e evitar estrés mecánico.En sistemas como brazos robóticos ou robots móbiles, a calibración axuda a manter os datos precisos e fiables, o que é importante para un control estable.
Figura 5. Un robot humanoide que detecta e explora o seu entorno en tempo real
Pero se necesitas un módulo máis avanzado, os sensores combinados como o STMicroelectronics LSM6DSOX proporcionan un maior nivel de integración e rendemento.Este dispositivo integra un acelerómetro de 3 eixes e un xiroscopio de 3 eixes nun único paquete, que admite rangos de acelerómetros de ata ±16 g e rangos de xiroscopio de ata ±2000 dps.Tamén inclúe un núcleo de aprendizaxe de máquina (MLC) e unha máquina de estados finitos (FSM) integrados, que permiten o procesamento de borde básico directamente no sensor.Con altas taxas de saída de datos (ata varios kHz) e baixa latencia, permite o seguimento simultáneo do movemento lineal e do movemento rotacional cunha sincronización estreita.Isto faino ideal para aplicacións que requiren equilibrio, coordinación e resposta en tempo real, como robots humanoides, drons e sistemas de movemento de varios eixes.
En entornos de alto rendemento ou de resposta rápida, a velocidade convértese no factor decisivo.Aquí é onde destacan sensores como o TDK InvenSense
ICM-20602
 ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
.Que pode proporcionar este IC?Ofrece un seguimento do movemento de baixa latencia e alta velocidade, o que permite que o robot reaccione case ao instante aos cambios.
Pero pode o robot manter a estabilidade en condicións cambiantes?Depende da eficacia da capa de percepción que alimenta continuamente os datos ao sistema de control.Un sistema de detección ben deseñado garante que cada movemento sexa supervisado e axustado en tempo real.Este enfoque utilízase amplamente en robótica porque mellora a precisión, reduce os riscos de falla e garante un rendemento consistente mesmo en ambientes imprevisibles.
Que factores afectan a comunicación entre os compoñentes do robot?Nos robots humanoides, os datos intercambian constantemente entre sensores, controladores e sistemas de motores.Esta comunicación debe permanecer estable mesmo con cargas de datos pesadas, xa que os atrasos, o ruído ou a perda de datos poden reducir a precisión e afectar o rendemento xeral.Un sistema de comunicación ben deseñado garante unha transferencia de datos fiable, permitindo que o robot sexa preciso e receptivo en tempo real.
Os robots modernos confían no protocolo Controller Area Network (CAN) para xestionar esta comunicación.CAN permite que varios dispositivos compartan unha única rede ao tempo que priorizan as mensaxes críticas.Isto dá lugar a unha coordinación eficiente entre os subsistemas e reduce o risco de conflitos de datos, especialmente en sistemas robóticos complexos de varios eixes.

Figura 6. Robot industrial que utiliza comunicación CAN para conectar e coordinar sistemas internos
A estabilidade da comunicación depende dos circuitos integrados do transceptor como o NXP
TJA1050
 TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
.Este transceptor CAN de alta velocidade cumpre co estándar ISO 11898 e admite velocidades de datos de ata 1 Mbit/s, polo que é axeitado para a comunicación en tempo real en sistemas robóticos e industriais.Funciona normalmente a partir dunha fonte de 5 V e interactúa directamente cos controladores CAN do microcontrolador a través de pinos TXD e RXD.O dispositivo converte os sinais lóxicos dun único extremo en saídas diferenciais CANH e CANL, o que mellora significativamente a inmunidade ao ruído durante longos cables.Tamén conta con baixa emisión electromagnética (EME), alta inmunidade electromagnética (EMI), protección térmica e protección contra curtocircuítos nas liñas de bus.
Que pasa coa escalabilidade do sistema do robot?Se planea ampliar ou actualizar os sistemas no futuro, a comunicación baseada en CAN facilita isto porque pódense engadir novos módulos á mesma rede sen redeseñar todo o sistema.Esta flexibilidade é unha vantaxe importante para aplicacións en crecemento como liñas de automatización ou plataformas de robótica avanzada.
Os motores de alta potencia e os circuítos de conmutación rápida xeran ruído eléctrico que pode interferir con sinais de control sensibles.Nos sistemas robóticos, isto xera un desafío porque os circuítos de control de baixa tensión deben funcionar xunto a etapas de potencia de alta tensión.Sen unha protección adecuada, as interferencias poden provocar un funcionamento inestable, datos do sensor inexactos e unha redución da fiabilidade do sistema.
Entón, o robot permanecerá estable cando os motores funcionen a plena carga?Pode manter lecturas precisas dos sensores en ambientes ruidosos?Para solucionar isto, os robots modernos usan o illamento dixital para separar as seccións de control e potencia.Isto permite que os datos pasen entre circuítos sen unha conexión eléctrica directa, bloqueando de forma efectiva o ruído e os picos de tensión que afecten os sinais críticos.Como resultado, o sistema pode manter un funcionamento estable e lecturas precisas dos sensores mesmo en ambientes con ruído eléctrico.

Figura 7.
ADUM1200
ADUM1200
AD
Out Stock
e
ADUM1201
ADUM1201
DIGITAL
Out Stock
Segundo as follas de datos de Analog Devices, dispositivos como o ADuM1200 e o ADuM1201 proporcionan illamento dixital mediante a transferencia de sinais a través dunha barreira de illamento magnético interno sen ningunha conexión eléctrica directa.Ambos son illadores dixitais de dobre canle baseados na tecnoloxía iCoupler®, capaces de alcanzar velocidades de datos de ata 25 Mbps mantendo un baixo retardo de propagación e unha precisa precisión de tempo.Normalmente admiten tensións de illamento de ata 2,5 kV RMS (dependendo da variante do paquete), polo que son axeitados para separar circuítos de control de baixa tensión das etapas de potencia de alta tensión.
O ADuM1200 dispón de dúas canles de dirección cara adiante, mentres que o ADuM1201 proporciona unha canle de avance e outra inversa, o que permite a comunicación bidireccional nos sistemas de control.Estes dispositivos funcionan a partir de tensións de alimentación estándar (normalmente 3,3 V ou 5 V) e consomen unha potencia relativamente baixa en comparación cos optoacopladores tradicionais, ao tempo que ofrecen unha fiabilidade mellorada e unha vida útil máis longa debido á ausencia de LED.
Ao manter a integridade do sinal, o illamento non só mellora a estabilidade e precisión do sistema, senón que tamén protexe os circuítos sensibles do estrés eléctrico, reducindo o risco de fallas e apoiando un funcionamento fiable en ambientes industriais continuos.
Como Tesla Optimus e outras plataformas impulsadas pola IA converten os sinais de sensores brutos en datos dixitais precisos para tomar decisións precisas?Os sensores non producen sinais dixitais listos para o seu uso;en cambio, xeran pequenas tensións analóxicas que representan movemento, forza ou posición.Estes sinais adoitan ser débiles e sensibles ao ruído, polo que deben estar debidamente acondicionados antes de que o sistema de control poida utilizalos de forma fiable.Se este proceso non se xestiona correctamente, incluso os sistemas avanzados de IA poden loitar con precisión e coherencia.
O proceso comeza co acondicionamento do sinal, onde os amplificadores de precisión como o AD8510 de Analog Devices xogan un papel.O AD8510 é un amplificador operacional de entrada/saída de carril a carril de baixo ruído deseñado para o procesamento de sinal de alta precisión, cunha tensión de compensación de entrada normalmente de 1 mV e baixa corrente de polarización, polo que é adecuado para interfaces de sensores sensibles.Funciona nun rango de subministración de 2,7 V a 5,5 V e ofrece un produto de ancho de banda de ganancia de aproximadamente 8 MHz cunha taxa de variación duns 5 V/µs, o que lle permite manexar sinais analóxicos de cambio rápido sen distorsión.A súa baixa distorsión harmónica total (THD) e a súa alta ganancia en bucle aberto garanten a integridade do sinal, mentres que características como a protección contra curtocircuítos e o funcionamento estable con cargas capacitivas fan que sexa fiable nos deseños de circuítos reais.En ambientes dinámicos, outros compoñentes como o AD8338 tamén se poden usar para o control de ganancia variable.
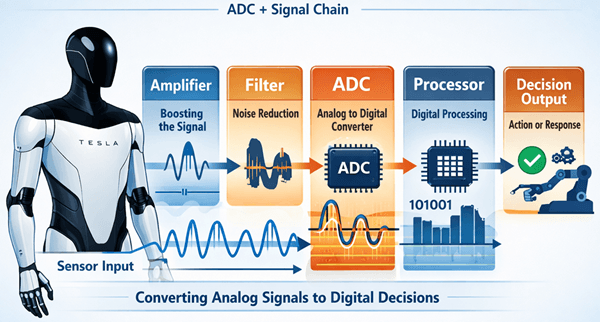
Figura 8. Procesamento analóxico a dixital en robots humanoides
Unha vez acondicionados, os sinais analóxicos convértense en datos dixitais mediante ADC de alto rendemento como o AD7616.Este dispositivo é un conversor analóxico-dixital de mostraxe simultánea de 16 canles cunha verdadeira resolución de 16 bits e un rendemento de ata 1 MSPS, que permite unha adquisición de datos precisa e rápida en varias canles.Admite rangos de entrada de ± 10 V e ± 5 V cunha parte frontal analóxica integrada, eliminando a necesidade de moitos compoñentes externos.O AD7616 presenta unha alta relación sinal a ruído (SNR) duns 90 dB e unha baixa non linealidade integral (INL), que garanten medicións precisas e repetibles.Tamén inclúe interfaces flexibles en serie e paralelas (compatibles con SPI), opcións de referencia no chip e funcionalidade de secuenciador para unha exploración eficiente de canles.
Nas plataformas robóticas multisensor, o rendemento de ADC incide directamente na calidade das decisións.A mostraxe simultánea garante que os datos de varios sensores permanezan aliñados no tempo, evitando inconsistencias que poidan levar a unha interpretación incorrecta ou unha resposta atrasada.A amplificación limpa combinada coa conversión de alta resolución permite que o sistema de control procese datos precisos do mundo real.
Esta etapa constitúe a ponte entre a sensación e a intelixencia.Cun acondicionamento de sinal preciso e un rendemento ADC fiable, os sistemas robóticos poden interpretar o seu ambiente con precisión e responder con accións suaves, estables e coordinadas, mesmo en condicións complexas e que cambian rapidamente.
Os robots modernos usan arquitectura IC porque o control do robot non é unha tarefa única.A detección, a conversión de sinal, a toma de decisións, a comunicación e a actuación do motor deben funcionar continuamente e na orde correcta.Se estas funcións non se separan en etapas claras, o ruído, os atrasos de tempo e os conflitos de sinal poden reducir a precisión do movemento e a estabilidade do sistema.
Unha arquitectura electrónica en capas facilita a xestión deste fluxo de traballo.Os sensores proporcionan entrada no mundo real, os circuítos ADC e cadea de sinal preparan datos utilizables, os microcontroladores procesan a lóxica de control, os controladores de motores executan o movemento e o illamento dixital CAN máis axuda a manter unha transferencia de datos fiable entre os módulos.Esta estrutura coincide co camiño de funcionamento real dentro dun robot, polo que é amplamente utilizado en sistemas robóticos humanoides, industriais e autónomos.
Un robot humanoide móvese ben só cando a súa electrónica funciona como unha cadea coordinada e non como partes illadas.En deseños prácticos, controladores como o
STM32F407VGT6
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
manexan unha rápida toma de decisións, os dispositivos motorizados como o
A4988SETTR-T
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
ou o TLE9879 converten os comandos en movemento estable e sensores como o LSM6DSOX proporcionan os datos de movemento en tempo real necesarios para o equilibrio e a corrección.Os dispositivos de comunicación como o
TJA1050
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
manteñen os subsistemas sincronizados, mentres que os illantes como o
ADUM1200
ADUM1200
AD
Out Stock
e o
ADUM1201
ADUM1201
DIGITAL
Out Stock
axudan a protexer a precisión do sinal en ambientes de enerxía ruidosos.As etapas de acondicionamento de sinal e os ADC como o AD7616 converten despois entradas analóxicas débiles en información dixital utilizable para o bucle de control.Cando estas capas permanecen aliñadas en tempo, calidade dos datos e resposta, o robot pode moverse con fluidez e reaccionar de forma fiable.Cando non o fan, nin sequera a IA avanzada non pode compensar a electrónica inestable.
Comparte esta publicación