CAN Bus é un importante sistema de comunicación usado en robótica para conectar sensores, controladores e actuadores a través dunha única rede.Axuda a reducir o cableado, mellorar a organización do sistema e garantir un intercambio de datos fiable.Este artigo explica como funciona a comunicación CAN e como os diferentes CI admiten o rendemento do sistema robótico.
Catálogo
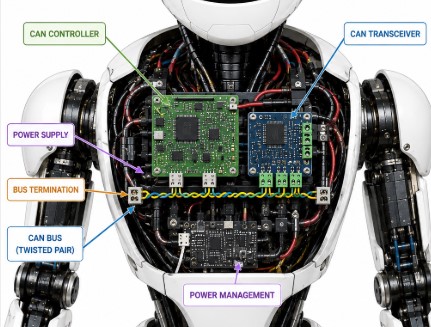
Figura 1. Bus CAN en robótica
O bus CAN úsase amplamente en robótica para a comunicación entre subsistemas distribuídos como controladores de motores, sensores, nodos codificadores, módulos IMU e controladores integrados.Permite que varios dispositivos compartan unha rede de comunicación, reducindo a complexidade do cableado e mellorando a organización do sistema en robots distribuídos.
CAN Bus admite o movemento sincronizado e a comunicación multixunta mediante o intercambio de datos en tempo real entre controladores, motores e sensores.Isto permite un movemento coordinado e un control robótico preciso en brazos robóticos e robots móbiles.A sinalización diferencial a través das liñas CANH e CANL proporciona unha forte inmunidade ao ruído, garantindo unha comunicación estable en ambientes robóticos e industriais con ruído eléctrico.
É moi utilizado en robots autónomos para soportar o intercambio de datos entre sensores, controladores e actuadores.Permite o procesamento continuo de entradas como a distancia, a velocidade e a posición, que son necesarias para a navegación, a detección de obstáculos e o control de movemento.O uso da mensaxería baseada en prioridades garante que os datos críticos se transmitan sen demora, o que admite a operación coordinada entre diferentes subsistemas.
Na implementación práctica, úsanse habitualmente varios IC.

Figura 2. NXP
TJA1050
 TJA1050
NXP
TJA1050 NXP SOP
In Stock: 39159 pcs
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 39159 pcs
NXP Semicondutores
TJA1050
•Converte sinais lóxicos en sinais CAN diferenciais
•Alta inmunidade ao ruído para ambientes industriais
• Admite comunicación CAN de alta velocidade (ata 1 Mbps)
•Proporciona unha transmisión de datos estable e fiable

Imaxe 3.
MCP2515
MCP2515
MICROCHIP
880
In Stock: 13570 pcs
Tecnoloxía de microchip
MCP2515
•Manexa o encadramento, filtrado e arbitraxe de mensaxes
•Soporte integrado de detección de erros e retransmisión
•Interface SPI para facilitar a conexión a microcontroladores
•Soporta marcos CAN estándar e estendidos
Imaxe 4.
STM32F103
STM32F103
ST
STM32F103 ST QFP-64
In Stock: 6611 pcs
STMicroelectronics
STM32F103
•Controlador CAN integrado para comunicación directa
•Procesamento de alta velocidade para o control en tempo real
•Múltiples interfaces para sensores e actuadores
•Baixo consumo de enerxía cun rendemento eficiente
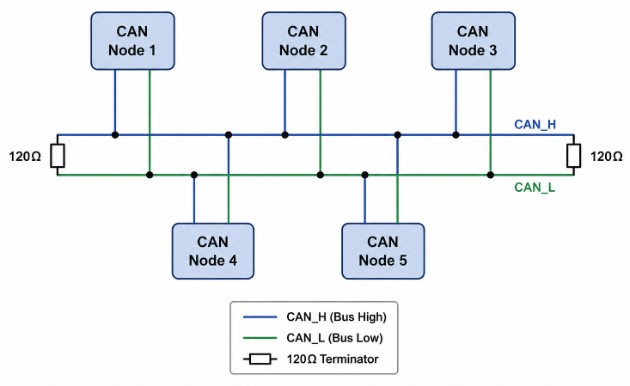
Figura 5. Diagrama de topoloxía CAN
A integración de sensores e actuadores mediante CAN Bus permite que os nodos codificadores, os nodos de motor e os módulos IMU se comuniquen de forma eficiente a través dunha rede compartida en sistemas robóticos.Os nodos do codificador proporcionan retroalimentación de posición e velocidade, os nodos do motor controlan o funcionamento do motor e os módulos IMU proporcionan datos de movemento e orientación para a navegación e a estabilización.Estes dispositivos intercambian información continuamente co controlador principal, permitindo un movemento do robot suave, sincronizado e coordinado en tempo real.
A comunicación é compatible con ICs transceptores CAN, como o TCAN1051 de Texas Instruments, admite comunicacións CAN FD de ata 5 Mb/s con protección térmica e contra curtos circuítos, mentres que o
ATA6561
ATA6561
ATMEL
ATA6561 ATMEL TDFN8
In Stock: 4700 pcs
de Microchip Technology ofrece baixo consumo de enerxía, forte inmunidade ao ruído e protección contra voltaxes transitorias para unha comunicación CAN robótica fiable.
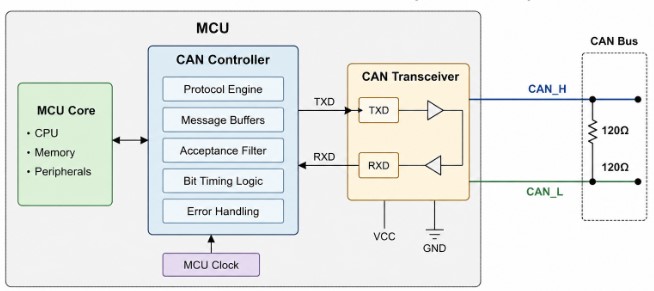
Figura 6. Arquitectura de comunicación do transceptor MCU e CAN
En robótica, o controlador CAN interno da MCU permite unha comunicación fiable entre varios subsistemas robóticos, como controladores de motores, nodos codificadores, sensores, sistemas de xestión de baterías e unidades de control integradas.O controlador CAN integrado no MCU xestiona funcións de comunicación importantes, incluíndo a transmisión e recepción de mensaxes a través dos transceptores CAN, filtrado de mensaxes, arbitraxe, control de temporización de bits, tratamento de erros e procesamento de acuse de recibo.O transceptor CAN converte os sinais CAN dixitais do MCU en sinais diferenciais de bus CAN_H e CAN_L, o que permite que varios nodos robóticos conectados ao bus CAN intercambien datos de forma eficiente, precisa e en tempo real.
Para conectar a MCU co bus CAN físico, utilízanse habitualmente circuitos integrados de transceptores CAN externos como o
SN65HVD230
SN65HVD230
TI
TI SOP8
In Stock: 15809 pcs
de Texas Instruments e o
MCP2562
MCP2562
MICROCHIP
1071
In Stock: 52514 pcs
de Microchip Technology.Estes IC admiten comunicacións CAN de alta velocidade de ata 1 Mb/s, proporcionan unha forte inmunidade ao ruído e inclúen funcións de protección como o apagado térmico, a protección contra curtocircuítos e a protección contra tensións transitorias.A súa sinalización diferencial fiable a través de CANH e CANL fainos axeitados para aplicacións robóticas que operan en ambientes electricamente ruidosos e complexos.
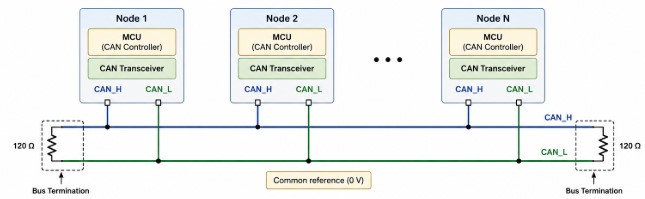
Figura 7. Comunicación de capa física BUS Can
A comunicación da capa física do bus CAN admite o sistema robótico proporcionando unha transmisión de sinal eléctrico fiable entre os nodos codificadors, nodos do motor, módulos IMU e o controlador principal.Utiliza dúas liñas de comunicación diferenciais, CANH e CANL, para transmitir datos binarios a través de diferenzas de tensión.Esta sinalización diferencial reduce o efecto do ruído eléctrico, permitindo unha comunicación estable e precisa en ambientes robóticos e industriais.
En robótica, o bus CAN usa habitualmente fíos de par trenzado cun calibre de fíos 22-24 AWG para minimizar a perda de sinal e as interferencias electromagnéticas.Unha densidade de torsión de aproximadamente 1-2 xiros por polgada mellora a inmunidade ao ruído e mantén a integridade do sinal durante a comunicación de alta velocidade.A codificación de cores estándar normalmente usa verde para CANH e amarelo para CANL para simplificar a identificación e mantemento do cableado.Resistores de terminación de 120 Ω colócanse nos dous extremos do bus para evitar a reflexión do sinal e garantir unha comunicación fiable entre os nodos robóticos.

Figura 8. Circuitos integrados de interface de sensor en robots baseados en CAN
Os CI de interface de sensor nos robots baseados en CAN admiten a comunicación entre os sensores e o controlador principal a través da rede CAN Bus.Sensores como codificadores, módulos IMU, sensores de temperatura e sensores de distancia xeran sinais de baixo nivel para o control do movemento, a navegación, o posicionamento e o seguimento.O acondicionamento do sinal é necesario porque o ruído do motor, as interferencias electromagnéticas e as longas vías de comunicación poden distorsionar os sinais débiles dos sensores, provocando lecturas imprecisas e un funcionamento inestable do robot.O filtrado, a amplificación, o illamento e a redución de ruído melloran a calidade do sinal antes da transmisión pola rede CAN.
Estes sistemas de interface admiten o intercambio de datos estable entre sensores e actuadores, axudando a manter o movemento, o equilibrio, o control de velocidade e a detección de obstáculos precisos.O bus CAN tamén ofrece sinalización diferencial, forte inmunidade ao ruído e comunicación sincronizada entre múltiples dispositivos robóticos.
A seguinte táboa mostra os circuitos integrados comúns de interface de sensor usados nos sistemas robóticos baseados en CAN, incluíndo as súas funcións e características principais.
Fabricante
|
Produto
|
Tipo
|
Función
|
Características clave
|
Microchip
Tecnoloxía
|
MCP3008
|
ADC
(10 bits)
|
Converte
sinais de sensores analóxicos en datos dixitais para procesar
|
SPI
interface, múltiples canles de entrada, conversión rápida
|
Texas
Instrumentos
|
ADS1115
ADS1115
TEXAS INSTRUMENTS
24044
In Stock: 35300 pcs
|
ADC
(16 bits)
|
Converte
sinais analóxicos de baixo nivel en datos dixitais de alta resolución
|
Alto
precisión, baixo ruído, interface I2C, amplificador de ganancia programable
|
Texas
Instrumentos
|
LM358
LM358
XJS
LM358 ON有批量 SOP8
In Stock: 29721 pcs
|
Op-Amp
|
Amplifica
e condiciona os sinais dos sensores antes da conversión
|
Baixo
potencia, amplo rango de tensión, ganancia estable
|

Figura 9. Circuitos integrados de xestión de enerxía para sistemas robóticos baseados en CAN
Os CI de xestión de enerxía para sistemas robóticos baseados en CAN regulan e distribúen a enerxía aos controladores, sensores, controladores de motores e módulos de comunicación CAN.Estes IC manteñen os niveis estables de tensión e corrente necesarios para o bo funcionamento do sistema.En robótica, os cambios de carga do motor, as flutuacións de potencia e o ruído eléctrico poden afectar a comunicación e o rendemento do sensor.Os circuítos de xestión de enerxía proporcionan regulación de tensión, filtrado, protección contra sobrecorriente e protección térmica para evitar a inestabilidade e protexer os compoñentes electrónicos.
O bus CAN admite unha comunicación estable entre subsistemas robóticos mediante a sinalización diferencial e a transmisión de datos resistente ao ruído.A distribución de enerxía estable reduce os erros de comunicación e mellora o rendemento dos nodos do codificador, dos nodos do motor e dos módulos IMU.Estas funcións axudan a manter unha comunicación sincronizada e un funcionamento robótico suave en ambientes robóticos industriais e móbiles.
Os seguintes IC de xestión de enerxía úsanse habitualmente en sistemas robóticos baseados en CAN para regular a tensión, xestionar a enerxía da batería e manter un funcionamento estable de sensores, controladores e módulos de comunicación.
Texas Instruments
LM2596
LM2596
BOLE
XINBOLE TO-263-220
In Stock: 88991 pcs
•Conversor DC-DC
•Reduce a tensión da batería para baixar os niveis de funcionamento
•Alta eficiencia ata o 90 %, tensión de saída axustable, protección de apagado térmico, protección contra sobrecorriente e baixa disipación de enerxía para sistemas de enerxía robóticos
Sistemas monolíticos avanzados
AMS1117
AMS1117
XINBOLE
AMS SOT-223
In Stock: 114930 pcs
•Regulador LDO
•Proporciona saída estable de baixa tensión
•Baixa tensión de caída, saída de ruído baixo, deseño de circuítos sinxelos, limitación de corrente e protección térmica para circuítos sensibles de sensor e controlador.
Texas Instruments BQ24075
•Cargador de batería IC
•Xestiona a carga da batería e a distribución de enerxía
•Protección contra sobretensión, regulación térmica, control da ruta de alimentación, monitorización da temperatura da batería e xestión automática de carga para sistemas robóticos portátiles
Robótica
Función
|
Recomendado
IC
|
IC
Tipo
|
Chave
Vantaxe
|
Distribuído
control motor
|
STM32F405
|
Activado para CAN
MCU
|
En tempo real
Procesamento CAN
|
Multi-nodo
comunicación robótica
|
LPC1768
LPC1768
NXP SEMICONDUCTORS
4914
In Stock: 5760 pcs
|
Activado para CAN
MCU
|
Dobre
Apoio á canle CAN
|
PODE
xestión de mensaxes
|
SJA1000
SJA1000
NXP
SJA1000 ARTSCHIP SOP8
In Stock: 1523 pcs
|
PODE
controlador IC
|
Fiable
manexo de mensaxes
|
Físico
Comunicación CAN
|
TJA1051
TJA1051
NXP
TJA1051 NXP SOP8
In Stock: 28946 pcs
|
PODE
transceptor IC
|
Alto
inmunidade ao ruído
|
Baixa potencia
Comunicación CAN
|
MCP2562
MCP2562
MICROCHIP
1071
In Stock: 52514 pcs
|
PODE
transceptor IC
|
Baixo
potencia en espera
|
Industrial
redes CAN de robots
|
SN65HVD230
SN65HVD230
TI
TI SOP8
In Stock: 15809 pcs
|
PODE
transceptor IC
|
Estable
sinalización diferencial
|
Comparte esta publicación